한번 기본적인 패키지를 생성해보려고 한다.
Topic 메세지를 이용한 Publisher , Subscriber 노드의 패키지이다.
ROS는 C++ , python 을 주로 활용하여 코드를 작성하는데 ,
C++의 활용도가 조금 더 높다고 한다.
먼저 모든것의 선행조건은 해당 디렉토리로의 이동이다.
앞서 이야기 했듯이 ROS 패키지는 워크스페이스의 src 디렉토리에서 생성한다.
src로 이동 하여 , 패키지를 생성하는 명령어를 실행한다.
$ catkin_create_pkg [생성할 패키지 이름] [의존성패키지1 의존성패키지2 ........]

위 명령에서의 [생성할 패키지이름]은 yh_210608_1 이 되고
의존성패키지로는 3개가 포함되는데 , std_msgs 와 roscpp , message_generation 이다.
std_msgs는 기본 메시지 방식을 사용한다는 것이고,
roscpp는 c++ 언어를 이용한다는 것이다.
message_generation 은 내가 메시지 까지 작성을 할때만 이용한다.
( 기본 메시지를 이용할때는 사용하지 않는다 )
* 여기서 메시지는 topic , service , action 을 이야기 한다.
여기까지 하였다면 src 디렉토리 하위에 패키지이름 (yh_210608_1) 디렉토리가 생성된다.
패키지 디렉토리로 이동하여 기본설정, 정보등을 먼저 수정한다.
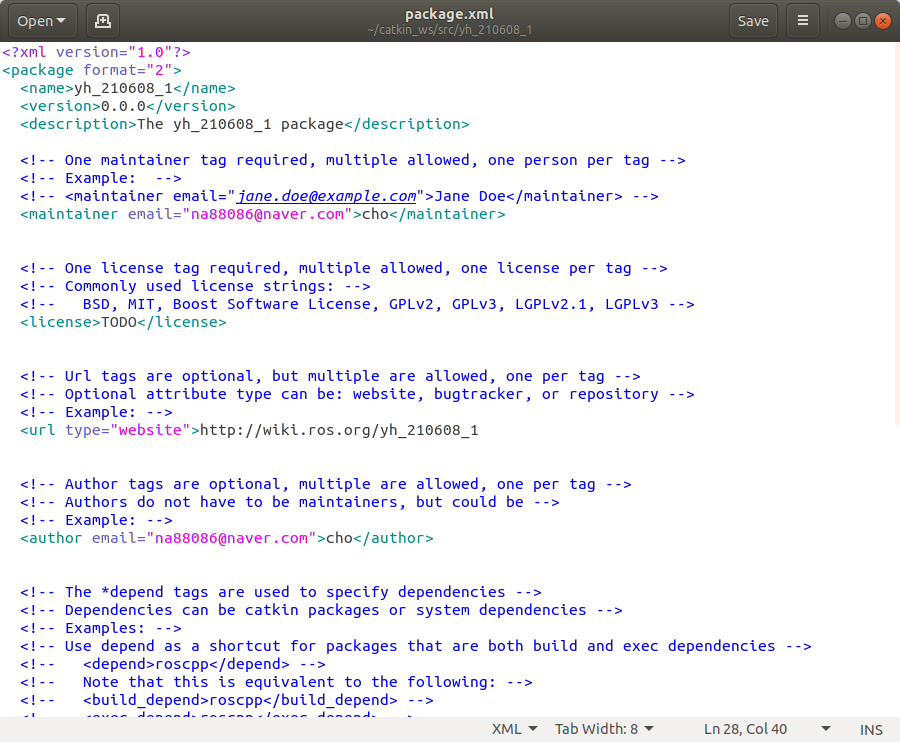
제일 먼저 packge.xml 을 수정하여 본다.
package.xml은 이 패키지의 기본 정보이다.
$ gedit pakage.xml
기존 그대로의 pakage.xml 파일이다.
여기서 수정을 안해도 되지만, 한번 수정해보자.
위의 패키지 관련 정보는 내가 만든 패키지 정보이니 name 등 한번 확인하고,
<mainainer> 는 유지보안관련자 정보이다.
정보를 수정해보자.
중간에 보면 <author> 정보가 있다. 패키지 생성자니까 이것도 수정해본다.
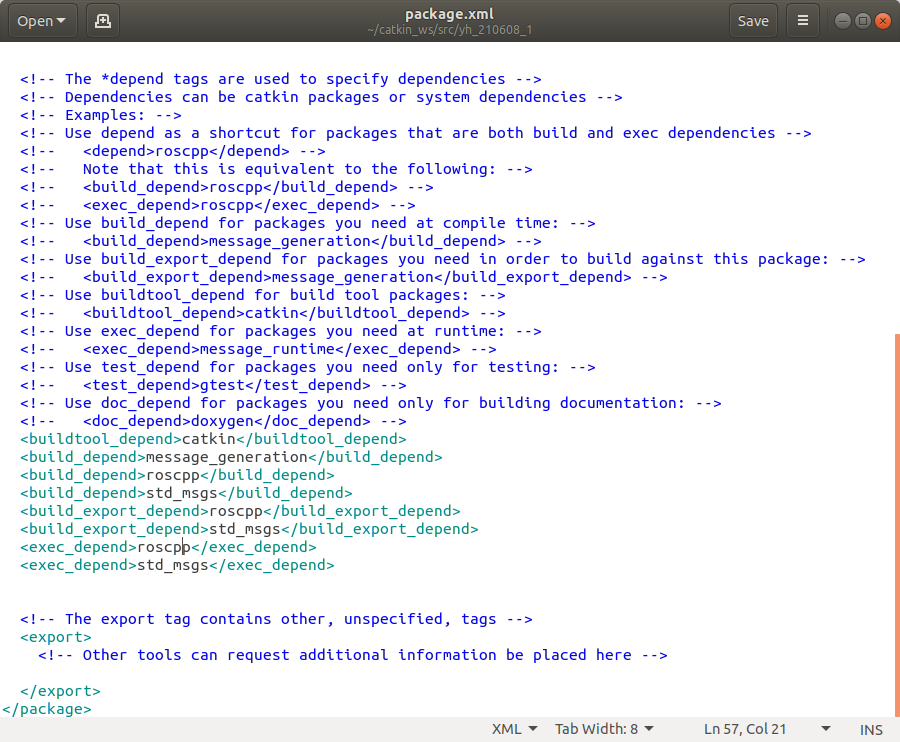
그리고 아래로 쭉 내리면
<buildtool_depend> 부터 내용이 있다.
catkin빌더를 이용하니까 catkin이 입력되어 있고,
아까 패키지 생성시 내가 입력한 의존성 패키지 관련하여 적혀있으니 참고한다.
*message_generation 은 메세지 생성시 한번만 이용하기 때문에 , build_depend에도 한번만 기재된다.
이제 그 다음으로는 메세지를 작성한다.
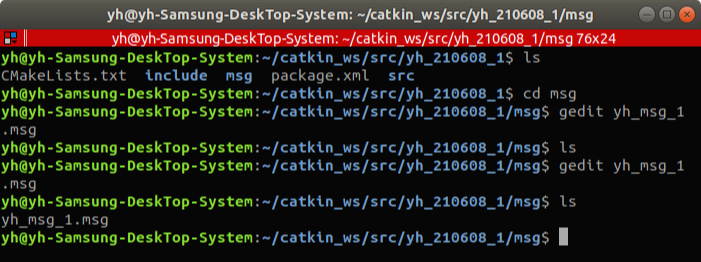
메세지디렉토리를 만들어야 한다. 이 디렉토리는 내가 만든 패키지 디렉토리인 yh_210608_1 하위에 만든다.
메세지의 종류로는 topic , service , action 이 있는데 디렉토리명으로 이용한다.
topic 은 메세지의 가장 기본이 되는 종류이기 때문에 , 그냥 메시지의 약자인 msg로 생성한다.
service 는 srv , action 은 action 으로 생성한다.
여기에서는 가장 기본이 되는 topic으로 생성한다.
생성 후에 msg 디렉토리로 이동하여 하위에 메세지파일을 만들어 준다.
확장자는 메세지 파일이라는 뜻으로 .msg로 만든다.
$ gedit [메시지파일 이름].msg
메시지파일 이름을 yh_msg_1로 만들어 보겠다.
만들어서 내용으로 간단하게 , 시간을 알리는 time과 숫자의 int32 를 형식으로 한 변수 두개를 만들었다.
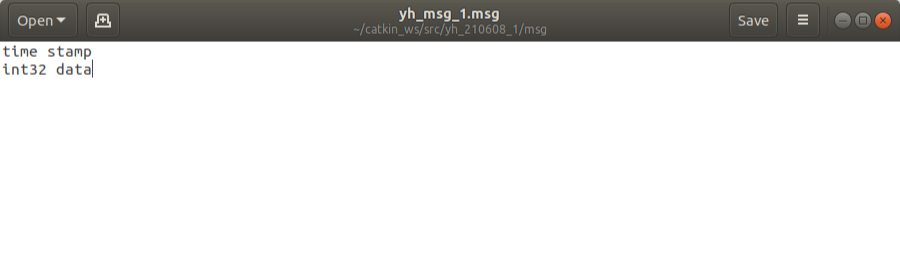
이렇게 하면 기본적인 topic 메세지를 생성한 것이 된다.
이제 패키지의 기본이 되는 노드를 만든다.
topic 메시지를 이용하는 노드는 계속 정보를 발행하는 Publisher ,
원하는 정보를 받아오는 Subscriber가 있다. 이 두개의 노드는 yh_210608_1 하위의 새로 생성된 src 디렉토리 하위에 파일로
생성한다.
먼저 노드 두개를 생성하고 안의 내용은 각각 수정하는 걸로 하겠다.
publisher 노드는 yh_pub_1 로 subscriber 노드는 yh_sub_1 로 생성한다. ( c++로 코드 작성하기 때문에 확장자는 .cpp)
두 개의 노드를 만들었으니 이제 publisher node부터 수정해 본다.
publisher node는 정보를 계속 보내는 노드이다.
c++ 형식에 맞게.. ROS 함수 형식에 맞게 작성하여 준다 .
코드 예제 (yh_pub_1.cpp)
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
|
#include "ros/ros.h" //ROS 기본 헤더파일
#include "yh_210608_1/yh_msg_1.h" //패키지이름 / 메세지파일.h
int main(int argc, char **argv) //c++ 의 기본 함수형태
{
ros::init(argc, argv, "yh_pub_1"); //노드명 초기화
ros::NodeHandle nh; //ROS시스템과 통신을 위한 노드핸들 선언
ros::Publisher pub = nh.advertise<yh_210608_1::yh_msg_1>("yh_topic_1",100);
//퍼블리시어 선언, 패키지 ()의 메시지파일()을 이용
//퍼블리시어()을 작성
//토픽명은 ()이며 퍼블리시어큐 사이즈를 ()개로 설정한다.
//publisher이기 때문에 advertise 만듬
ros::Rate loop_rate(2); //루프 주기를 2Hz로 설정 (1초에 2번)
yh_210608_1::yh_msg_1 msg; //내가 만든 메시지 파일 형식으로 ()라는 메세지선언
int count = 0;
while(ros::ok()) //ros 가 활성화되면
{
msg.stamp = ros::Time::now(); //현재 시간을 msg 하위 stamp메세지에 담음
msg.data = count; //count 변수 값을 msg 하위 data 메세지에 담는다.
ROS_INFO("send msg = %d", msg.stamp.sec);
ROS_INFO("send msg = %d", msg.stamp.nsec);
ROS_INFO("send msg = %d", msg.data);
pub.publish(msg);
loop_rate.sleep();
++count;
}
return 0;
}
|
cs |
다음은 이 publisher를 받을 subscriber node를 작성한다.
코드예제(yh_sub_1.cpp)
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
#include "ros/ros.h"
#include "yh_210608_1/yh_msg_1.h"
void msgCallback(const yh_210608_1::yh_msg_1::ConstPtr&msg) //const 상수
{
ROS_INFO("receive msg = %d", msg -> stamp.sec);
ROS_INFO("receive msg = %d", msg -> stamp.nsec);
ROS_INFO("receive msg = %d", msg -> data);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "yh_sub_1");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("yh_topic_1",100,msgCallback);
ros::spin(); //어떤 값이 들어오기 전까지 대기 (다시 위로 올라감)
return 0;
}
|
cs |
노드 파일을 다 작성하였으면 , 해당 패키지의 CMakelists.txt 파일을 수정한다.
주석 부분을 해제해야하고 , 노드 관련하여 수정해야 한다.
아래는 수정 관련이니 , 비교하면서 바꾸면 된다.
######## install ####### 관련 부분은 건드리지 않아도 된다.
이제 !!!! 패키지는 완성이다 .
실행이 잘 되는지 확인하자!
먼저 cd ~/catkin_ws && catkin_make 를 실행한다.
후에 빌드된 내용을 source devel/setup.bash 명령어로 등록시켜주고,
rospack profile 을 실행한다.
이제 터미널을 켜고 , roscore 로 마스터를 실행하고 ,
다른 터미널로 rosrun yh_210608_1 yh_pub_1 퍼블리셔 노드를 실행하고 정보가 출력되는게 확인 되면
다른 터미널로 rosrun yh_210609_1 yh_sub_1 서브스크라이브 노드를 실행하고 정보를 받아오는 것을 확인하자.
굿!
'IT 프로그래밍 관련 > ROS' 카테고리의 다른 글
| ROS 분석하는 방법(자주 쓰이는 분석 명령어...) (0) | 2021.06.11 |
|---|---|
| ROS 패키지 생성하기(ServiceServer, ServiceClient, Service사용) (0) | 2021.06.09 |
| ROS 패키지 디렉토리 (0) | 2021.06.08 |
| ROS 관련 기본 용어 (0) | 2021.06.07 |
| 생활속의 로봇 (0) | 2021.06.02 |




댓글